









Ancient Marine Life Inspires Modern Robotic Systems




Nature has long served as inspiration for cutting-edge engineering—especially in the realm of underwater propulsion.
In a recent study published in July’s issue of npj Robotics, Mihai “Mishu” Duduta, an assistant professor in the School of Mechanical, Aerospace, and Manufacturing Engineering in the College of Engineering, along with his team of graduate students, unveiled RoboNautilus.
“RoboNautilus is a fully soft robotic system inspired by the jet propulsion mechanics of cephalopods,” says Duduta. “By mimicking the unique anatomy and fluid dynamics of these ancient marine animals, the team demonstrated a new approach to efficient, low-noise underwater locomotion, powered entirely by dielectric elastomer actuators (DEAs).”
This is Duduta’s first study published where the work was completed solely at UConn.
The team chose this animal because it is both hard to replicate and historically appropriate. The robot is inspired by the USS Nautilus, which was the first ever nuclear-powered submarine, built in Connecticut in 1955.
Duduta also feels a strong connection towards Admiral Hyman Rickover, who led the building of the USS Nautilus in just 3 years, a great feat of engineering and management. Duduta says he has learned much about leadership and team building from Rickover’s lessons.
Cephalopods are the only natural swimmers known to use pulsed jet propulsion for movement, relying on rhythmic expansion and contraction of a soft mantle cavity. This allows them to draw in and forcefully expel water, propelling themselves with surprising efficiency and agility.
Reproducing this mechanism in robotics has proven difficult due to the limitations of soft actuators—most solutions rely on rigid motors or bulky hydraulic systems.
Enter RoboNautilus: a fully integrated, self-contained underwater robot that uses multilayer DEAs to drive water jetting through a soft siphon. These solid-state actuators deform in response to high voltage, eliminating the need for rigid parts while maintaining control, efficiency, and compact design.
The result is a truly bioinspired soft robot capable of continuous swimming, onboard sensing, and environmental monitoring. With its quiet, efficient propulsion and soft-bodied design, RoboNautilus is especially well-suited for exploration in sensitive marine habitats, where traditional, rigid robots risk causing damage or disturbance.
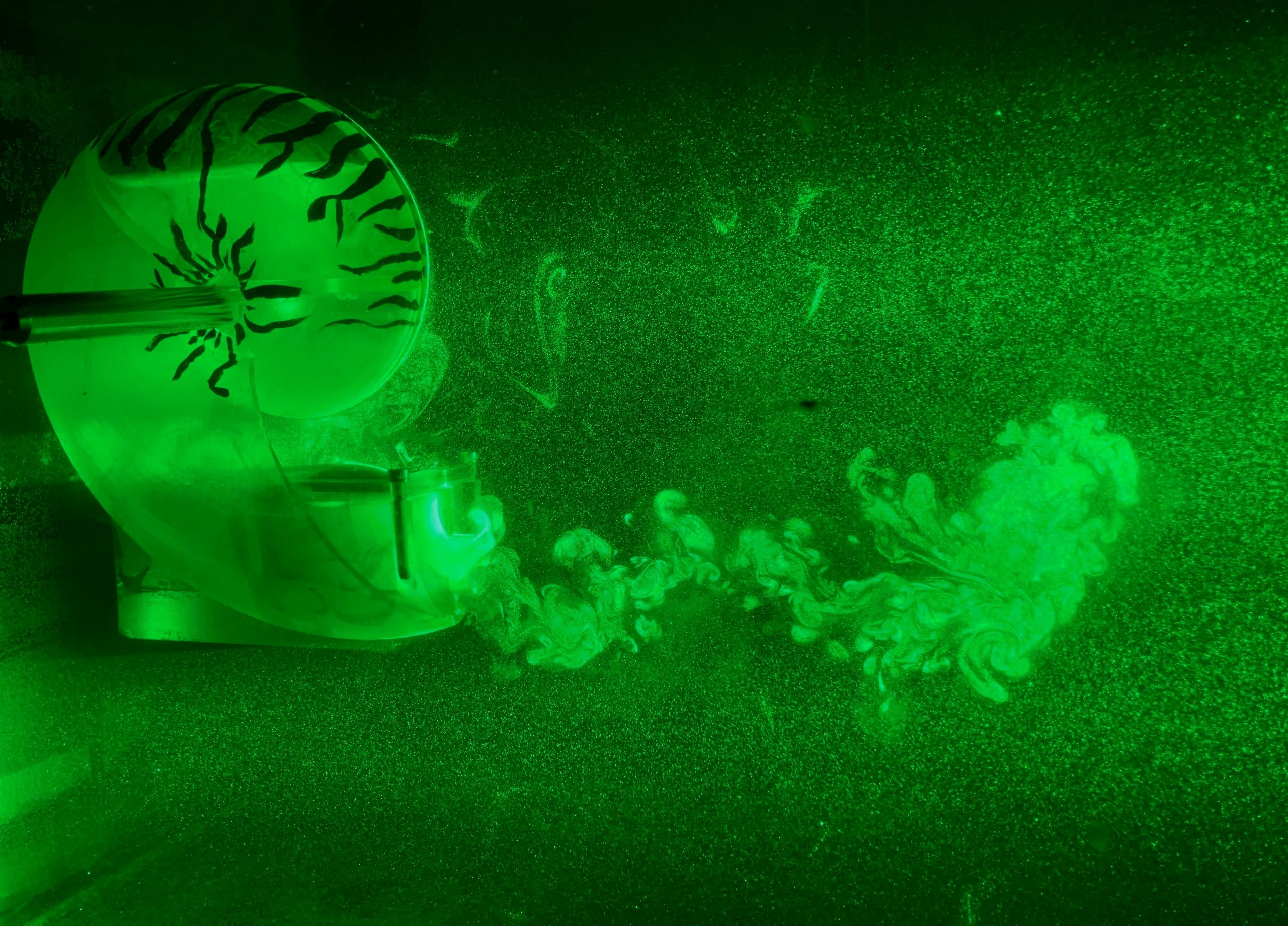
The RoboNautilus shell was designed using 3D printing, modeled after the Nautilus belauensis, with internal chambers restructured to house electronics and air pockets for buoyancy and passive self-righting.
A soft DEA membrane, mounted at the anterior nozzle, mimics the animal’s mantle. When energized, the membrane inflates and contracts cyclically, drawing in and expelling water to generate thrust.
Beyond propulsion, the RoboNautilus demonstrates potential for environmental monitoring. The robot includes an onboard camera, as well as temperature and salinity sensors, integrated for shallow-water testing. These tools enable it to gather key data in delicate marine ecosystems without disturbing surrounding life—a major advantage of soft robots over their rigid counterparts.
Future iterations may incorporate thrust vectoring, autonomous navigation, and more advanced sensing capabilities. With soft materials, onboard power, and quiet, jet-based locomotion, RoboNautilus points the way toward a new class of low-impact underwater explorers for research, surveillance, and conservation.
“We started with a Nautilus to leave ourselves room to grow,” says Duduta. “Nautili have been around for 480 million years, and there are many extinct variants with really interesting shapes.”
Duduta has an outreach activity in Barrington, R.I. planned for this fall, where he and his team will crowdsource shell design work with high school students.
“Because the extinct Nautili cannot be actively studied anymore, we continue to brainstorm new shell designs,” Duduta says. “Then, we will help the high school students make the Nautili into robots to see which swims the fastest and which survives at the deepest point. These young students will be able to participate in our research, connecting ancient biology to modern robotics.”
Latest UConn Today
- Connecticut’s First Pediatric DBS for Epilepsy: A New Era in CareThanks to a groundbreaking collaboration between Connecticut Children’s and UConn Health, Drs. Christopher Conner and David Hersh became the first in Connecticut to perform deep brain stimulation on a child with drug-resistant epilepsy—paving the way for others like Bella to benefit.
- Three CoE Students Pursue In-Depth Research Projects as University ScholarsChinmaya Vobbineni ’26, Wyeth Haddock ’26, and Zhengyang Wei ’26 are helping heal wounds, designing space exploration material, and preventing turbulence for more efficient flights
- Building Connecticut’s Shellfish Workforce and Industry ResilienceWith learning in the field and classroom, CT Sea Grant offers a program that combines science, policy, and lived experience to help launch Connecticut businesses
- UConn Medical Students Bike Cross-Country for Suicide PreventionUConn School of Medicine students’ Coast-2-Coast bike trek raises over $20,000 for mental health research
- Rooted in Wisdom: Garden Party Celebrates Menopause, Sisterhood, and Health EquityThis community-led event was part of the UConn Health Disparities Institute's Menopause Equity Initiative (MEI), a statewide effort to break the silence, reduce stigma, and create community-informed solutions to support women's midlife health.
- Neag School Alumni Board Names Recipients of its 2025 ScholarshipGraduate students Emmanuel Dwamena, Caroline Shadman, and Claudia Ventura are recipients of the fund, which was created as a way to invest in future generations of Neag School students